������ʁ@update 20180429
������ʂ��āH
���g���錴���������ƌĂт܂��B
�Ⴆ�A�b�����͉��g�ŁA����ׂ��Ă���{�l�������Ƃ������Ƃ��ł��܂��B�܂��A�H������ł͑����͉��g�ŁA���̑������Ă���d�@�������Ƃ����܂��B
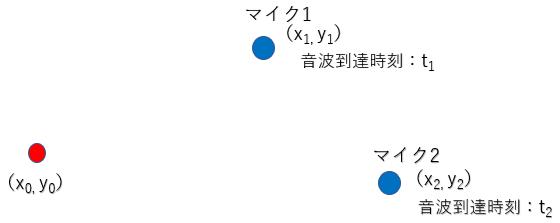
����ȉ����ɑ��āA�����̃}�C�N���z���i�ȉ��}�C�N�ƌĂт܂��j����ׂāA���g���e�}�C�N�ɓ��B���鎞�ԍ�����A�����̈ʒu�𐄒肷�邱�Ƃ��ł��܂��B�����������ʂƂ����܂��B
���߂��痧�̓I�Ȕz�u���l����ƁA�ƂĂ����G�ɂȂ�̂ŁA�������}�C�N�����ʏ�ɂ���ƍl���܂��傤�B���̓I�Ȕz�u���l����͕̂��ʂ̘b���ς�ł���ł��x���͂Ȃ��Ǝv���܂��B
�����P�Ƀ}�C�N�P�̏ꍇ
�}�C�N��1���ƁA�����̗L��E�����Ɖ��̋��オ�킩��܂��B�ł����A�ǂ���̕������特������Ă���̂����킩��܂���B
�����P�Ƀ}�C�N�Q�̏ꍇ
�}�C�N�Q���ƁA�l�Ԃ̎���A�z����̂ŁA�Ȃ�ƂȂ����̂���Ă�������܂ł͕������Ȃ��̂��Ǝv���܂��B
�P�̉����ƃ}�C�N�P�A�}�C�N�Q�����ʏ�ɔz�u����Ă���ꍇ�Ōv�Z���Ă݂܂��傤�B
�����P�̑��ă}�C�N���Q�̏ꍇ�̊W�������߂�
�ix0 �Cy0 �j�F�����̍��W
�ix1�Cy1�j�F�}�C�N1�̍��W
�ix2�Cy2�j�F�}�C�N2�̍��W
v�F����
L1�F��������}�C�N1�܂ł̋����C
L2�F��������}�C�N2�܂ł̋���
t1�F�}�C�N1�̉��g���B�����C
t2�F�}�C�N2�̉��g���B����
t2��L2/v�@�it2�F�}�C�N2�̉��g���B�����CL2�F��������}�C�N2�܂ł̋����Cv�F�����j
t1��L1/v�@�it1�F�}�C�N1�̉��g���B�����CL1�F��������}�C�N1�܂ł̋����Cv�F�����j
L2 ��SQRT((x2-x0)^2+(y2-y0)^2) �@�@�i�ix0�Cy0�j�F�����̍��W�j
L1 ��SQRT((x1-x0)^2+(y1-y0)^2) �@�@�i�ix2�Cy2�j�F�}�C�N2�̍��W�A �ix1�Cy1�j�F�}�C�N1�̍��W�j
����(t2-t1)��(L2-L1)/v
(t2-t1)*v��L2-L1��SQRT((x2-x0)^2+(y2 -y0)^2) -SQRT((x1-x0)^2+(y1-y0)^2)
(t2-t1)^2*v^2��(x2-x0)^2+(y2 -y0)^2+(x1-x0)^2+(y1-y0)^2+2*SQRT((x2-x0)^2+(y2-y0)^2) *SQRT((x1-x0)^2+(y1-y0)^2)
(t2-t1)^2*v^2�|((x2�|x0)^2 �{ (y2 �|y0)^2 �{(x1�|x0)^2 �{ (y1 �|y0)^2)��2*SQRT((x2�|x0)^2 �{ (y2 �|y0)^2) *SQRT((x1�|x0)^2 �{ (y1 �|y0)^2)
����^2�� ((t2-t1)^2*v^2-((x2-x0)^2+(y2-y0)^2+(x1-x0)^2+(y1-y0)^2))^2
�E��^2�� 4*((x2-x0)^2+(y2-y0)^2)*((x1-x0)^2+(y1-y0)^2
����������
0=����^2-�E��^2
=((t2-t1)^2*v^2-((x2-x0)^2+(y2-y0)^2+(x1-x0)^2+(y1-y0)^2))^2-4*((x2-x0)^2+(y2-y0)^2)*((x1-x0)^2+(y1-y0)^2)
��
+4*((x2-x1)^2-(t2-t1)^2*v^2)*x0^2
+4*(-(x2-x1)*((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))+(t2-t1)^2*(x2+x1)*v^2)*x0
+8*(x2-x1)*(y2-y1)*x0*y0
+4*((y2-y1)^2-(t2-t1)^2*v^2)*y0^2
+4*(-(y2-y1)*((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))+(t2-t1)^2*(y2+y1)*v^2)*y0
+((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))^2-2*(t2-t1)^2*v^2*(y2^2+y1^2+x2^2+x1^2)+(t2-t1)^4*v^4
=0
�������W�́A�}�C�N1(x1�Cy1)�ƁA�}�C�N2(x2�Cy2)�Ɖ��g���B�����̍�(t2�|t1)�A����щ���v�ɂ��W��������2���Ȑ���ɂ���B�i���̏ꍇ��2���Ȑ��͑o�Ȑ��j
----- �����܂Ł@20180422 -----
�����P�̃}�C�N�R�̏ꍇ
�����ʒu(x0, y0)�𐄒肷��v�Z�������߂�B
�e�}�C�N�̈ʒu��(x1, y1), (x2, y2), (x3, y3)�A�����ʒu��(x0, y0)�A
���̔���������t0�i���m�j�A�e�}�C�N�ɉ������B���鎞���� t1, t2, t3 �Ƃ���B
�E�}�C�N�P�C�Q�ɉ������B���鎞�ԍ�(t2-t1)���玟�������藧�B
SQRT((x2-x0)^2+(y2-y0)^2) �|SQRT((x1-x0)^2+(y1-y0)^2) = v*(t2-t1)�@�c�@
v : �����i���m�A�C���ɂ�茈�܂�j �@
���l�ɁA�}�C�N�Q�C�R�ɉ������B���鎞�ԍ�(t3-t2)���玟�������藧�B
SQRT((x3-x0)^2+(y3-y0)^2) �|SQRT((x2-x0)^2+(y2-y0)^2) = v*(t3-t2)�@�c�A
�������A�����ł͉����ʒu�����߂邽�߂Ɉȉ��̎菇���̗p����B
�E��������e�}�C�N�܂ł̋����Ɖ��̓��B���Ԃ�莟�������藧�B
SQRT((x1-x0)^2+(y1-y0)^2) = v*(t1-t0) �@�c�C
SQRT((x2-x0)^2+(y2-y0)^2) = v*(t2-t0) �@�c�D
SQRT((x3-x0)^2+(y3-y0)^2) = v*(t3-t0) �@�c�E
�E�C�`�E��2�悷��ƁA
(x1-x0)^2 + (y1-y0)^2 = (v*(t1-t0))^2�@�c�F
(x2-x0)^2 + (y2-y0)^2 = (v*(t2-t0))^2 �@�c�G
(x3-x0)^2 + (y3-y0)^2 = (v*(t3-t0))^2 �@�c�H
�E�F����G�������ƁA
(x1-x0)^2 + (y1-y0)^2 - (x2-x0)^2 - (y2-y0)^2 = (v*(t1-t0))^2 - (v*(t2-t0))^2
�W�J�������āA
(x1^2+y1^2-x2^2-y2^2)-2*x0*(x1-x 2) -2*y0*(y1-y2) = (v^2)*(t1^2-t2^2)-2*(v^2)*t0*(t1-t2)�@�c�I
�E���l�ɁA�F����H�������A�W�J��������ƁA
(x1^2+y1^2-x3^2-y3^2)-2*x0*(x1-x 3) -2*y0*(y1-y3) = (v^2)*(t1^2-t3^2)-2*(v^2)*t0*(t1-t3) �@�c�J
�E�I�A�J��ό`���āA
-2*(y1-y2)*y0+2*(v^2)*(t1-t2)*t0 = (v^2)*(t1^2-t2^2)-(x1^2+y1^2-x2^2-y2^2)+2*(x1-x2)*x0 �@�c�K
-2*(y1-y3)*y0+2*(v^2)*(t1-t3)*t0 = (v^2)*(t1^2-t3^2)-(x1^2+y1^2-x3^2-y3^2)+2*(x1-x3)*x0�@�c�L
�E�����ŁA
�@�@a1=-2*(y1-y2),
�@�@b1= 2*((v^2)*(t1-t2),
�@�@c1= (v^2)*(t1^2-t2^2)-(x1^2+y1^2-x2^2-y2^2),
�@�@d1= 2*(x1-x2)
�@�@a2= -2*(y1-y3),
�@�@b2= 2*(v^2)*(t1-t3),
�@�@c2= (v^2)*(t1^2-t3^2)-(x1^2+y1^2-x3^2-y3^2),
�@�@d2= 2*(x1-x3)
�Ƃ����ƁA�K�A�L��
�@�@a1*y0 + b1*t0 = c1 + d1*x0�@�c�M
�@�@a2*y0 + b2*t0 = c2 + d2*x0�@�c�N �ƂȂ�B
�E�����y0, t0�Ɋւ���A���������ƍl���ĉ����ƁA
�@�@y0 = A*x0 + B�@�c�O
�@�@t0 = C*x0 + D�@�c�P
�����ŁAA = (b2*d1-b1*d2)�^(a1*b2-a2*b1),
B = (b2*c1-b1*c2)�^(a1*b2-a2*b1)
�@�@�@ C = (a1*d2-a2*d1)�^(a1*b2-a2*b1),
D = (a1*c2-a2*c1)�^(a1*b2-a2*b1)
�E���� y0�At0���F�ɑ������ƁAx0�Ɋւ��鎟��2����������B
�@�@(x1-x0)^2 + (y1-(A*x0+B))^ 2 = (v*(t1-(C*x0+D)))^2
x0�ɂ��Đ�������ƁA
�@�@E*x0^2 + F*x0 + G = 0
�����ŁA
�@�@�@E = 1+A^2-(v^2)*(C^2)
�@�@�@F = -2*x1-2*(y1-B)*A +2*(v^2)*(t1-D)*C
�@�@�@G = x1^2+(y1-B)^2-(v^2)*(t1-D)^2
�E����2���������������Ɖ��̔����ʒux0�������A
�X�ɇO���y0�����߂���B
�@�@x0 = (-F�}SQRT(F^2 - 4*E*G))�^(2*E)�@�@�i�A���AF^2 - 4*E*G �� 0 �̂Ƃ��j
�i���jx0�Ɋւ���2������������͒ʏ�����Q�����邪�A
�@�@�@����x0���P�ɑ������ ������t0�ɂ��āA
�@�@�@t0 �� t1, t2, t3 �����Ȃ����̂͏��O����B
������x0(+)�� (-F+SQRT(F^2 - 4*E*G))�^(2*E)
�@�@�@x0(�|)�� (-F�|SQRT(F^2 - 4*E*G))�^(2*E)
�Ƃ����
�@�@�@�@�@y0(+)��A*x0(+) + B
�@�@�@�@�@y0(�|)��A*x0(�|) + B
�ƂȂ�B
�����͂P�ł����A�v�Z�������2���܂邱�ƂɂȂ�܂��B
�ǂ��炩����͋����Ƃ������Ƃł��B
----- �����܂Ł@20180423 -----
�������������@�́H
�}�C�N���S�A�T�Ƒ��₵�Ă����Ă��A����܂ł���Ă����A�����������������@�ł́A������x���W�����߂鎮�̎������Q������P���ɉ����邱�Ƃ͂ł��Ȃ��悤�ł��B
�Q���̂܂܂��ƁA��ɋ����������Ă��܂��܂��B
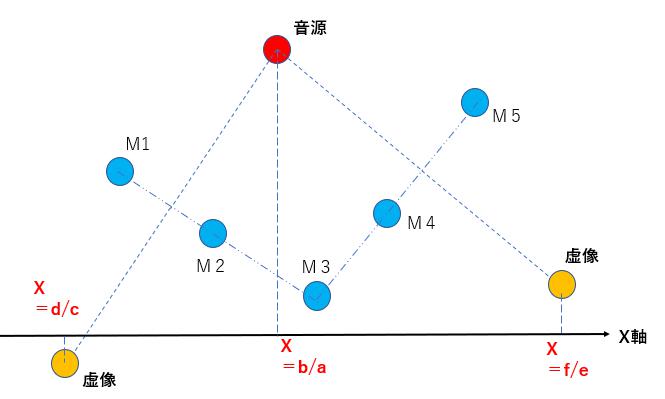
�����ŁA�}�C�N���U�������āA�R�ÂQ�̃O���[�v�ł��ꂼ�ꉹ���̈ʒu���v�Z����Ƃ��܂��B
���A�}�C�N�l�P�A�l�Q�A�l�R�̃O���[�v�ŋ��߂��鉹����X���W���Ax=b/a�i�^�̉�����x���W�j��x��d/c�i�����j�A
�}�C�N�l�S�A�l�T�A�l�U�̃O���[�v�ŋ��߂��鉹����X���W���Ax=b/a�i�^�̉�����x���W�j��x=-f/e�i�����j�Ƃ��܂��B
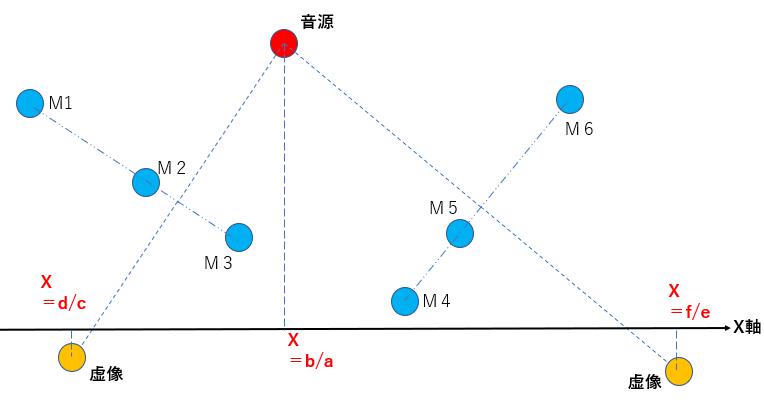
�R�̃}�C�N�ŋ��߂��鉹�����W�́A��ɁA�^�̍��W�Ƌ����̍��W�̂̃y�A�ɂȂ�܂��B�ǂ̃}�C�N�̃O���[�v������Ă��A���ꂩ�狁�߂���Q�̍��W�̂����P�͐^�̉������W�ł�����A���������P���Q���̘A�����������l���邱�Ƃ��ł��܂��B
�����ŁA
1�̋��ʂ̍�x=b/a������2��2�����������l����B
(ax-b)(cx-d)=0
(ax-b)(ex-f)=0
�W�J�����
acx�O2-adx-bcx+bd=0
aex�O2-afx-bex+bf=0
a��0�Ac��0�Ae��0�̂Ƃ�
x�O2�̍�����������
a�O2cex�O2-a�O2dex-abcex+abde=0�E�E�E�M
a�O2cex�O2-a�O2cfx-abcex+abcf=0�E�E�E�N
�M-�N�͈ȉ��̂Ƃ���
a�O2(cf-de)x-ab(cf-de)=0
cf��de�̂Ƃ��A�i�����2��2���������͈قȂ邱�Ƃ��Ӗ�����j
a�O2x-ab=0
a��0������
ax=b
���@x=b/a�@���@�^�̉�����X���W��������܂����B
A��0�łȂ������̂Ƃ��A A (cx-d)= (ex-f)�Ƃ���B�����Ȃ�x�̒l�ɂ������Ă��A(Ac-e)x-(Ad-f)=0��
���藧�����邽�߂ɂ� Ac=e����Ad=f�ł��邩��AA=e/c�AA=f/d�@�@���@e/c=f/d �@���@cf=de
�}�C�N�͂U������̂��H
�}�C�N���U�g���ƁA���������������Ȃ��Ƃ��킩��܂����B
�������A�}�C�N���U�g���Ă��A�꒼���ɕ��ׂĂ��܂��ƁA�����������ꏊ�ɂł���ix���W�������ɂȂ�j�̂ňӖ����Ȃ��Ȃ�܂��B
�������قȂ�ꏊ�ɂł���悤�Ƀ}�C�N�̔z�u���l���Ȃ��Ă͂Ȃ�܂���B
�꒼���ɕ��ׂȂ���A1�̃}�C�N�����ʂɎg�����ƂłT�ŗǂ����ƂɂȂ�܂��B
���̏ꍇ�A�l�P�A�l�Q�A�l�R�łЂƂ̃O���[�v�A�l�R�A�l�S�A�l�T�ł����ЂƂ̃O���[�v�Ƃ��Čv�Z�����܂��B
�ЂƂ̃O���[�v���̃}�C�N�̕��ѕ��͈꒼���ł��B
�R�̃}�C�N�̕��ѕ����ł͂Ȃ��s�K���ɂ���ƁA�S�ŗǂ����ƂɂȂ�܂��B
----- �����܂Ł@20180426 -----
�v�Z���Ă݂܂�
�}�C�N�S�̈ʒu�W���ȉ��̂悤�ɐݒ肵�܂��B
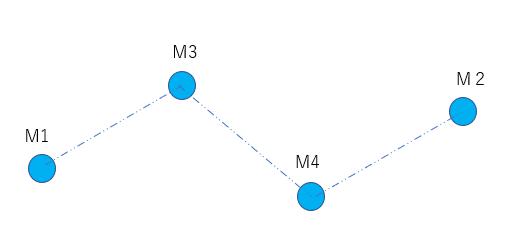
���ꂼ��̃}�C�N��x-y���W�����̂悤�ɂ��܂��B���̎��̉������A334m/���Ƃ��āA�}�C�N�ł̑��萸�x��1000����1�b�Ƃ��܂��B
�l�P�F�i���C���j���i0m�C1m�j�A���莞����12.700�b
�l�Q�F�i���C���j���i3000m�C-1m�j�A���莞����8.985�b
�l�R�F�i���C���j���i1000m�C30m�j�A���莞����10.720�b
�l�S�F�i���C���j���i2000m�C-30m�j�A���莞����9.5530�b
�l�P�`�l�Q�`�l�R�̑g�ݍ��킹�ɂ�鉹�����W�̌v�Z��

�y��

�ƂȂ�܂��B
���̒i�K�ł́A�ǂ��炪�^�̉������W���킩��܂���B
���ɂl�P�`�l�Q�`�l�S�̑g�ݍ��킹�ɂ�鉹�����W���v�Z���܂��B

�y��

���̂悤�Ɍv�Z���ʂ���ׂĂ݂�ƁA�^�̉������W�͂Ȃ�ƂȂ��i���C���j���i3000���A3000���j�Ɨ\�z�ł��܂��B
���ہA�������W��

�ɐݒ肵�Ă��܂����B
�����ŁA�����������Ĉ�C�ɐ^�̉������W�����߂Ă݂܂��傤�B
�}�C�N�̑g�ݍ��킹�l�P�`�l�Q�`�l�R�ɂ��v�Z�̒n���Ŏg�p�����W���@�d�P�C�e�P�C�f�P�ƁA
�l�P�`�l�Q�`�l�S�ł̌W���@�d�Q�C�e�Q�A�f�Q��p����

�����W���Q�v�Z���Ă���̂́A���ꂼ��̃}�C�N�̑g�ݍ��킹�̓r���v�Z�Ŏg�p�����W���`�C�a���g�p�������ʂŁA�ǂ�����g�p���Ă��ǂ����A���ϒl���Ƃ��Ă��ǂ��̂ł͂Ǝv���܂��B
�����ƃ}�C�N�̍��W���狗�����v�Z���āA����������Ŋ������l�𑪒莞���Ɏg���Ƃ����A�������W�v�Z�Ō�Z���o�Ȃ��Ǝv��������Ȃ̂ɁA�v�Z���Ă݂�ƁA�ݒ肵���������W�ƌv�Z�����������W������ׂĂ݂�ƌ덷�������Ă��܂��B����́A�e�}�C�N�ł̎����̑��萸�x��1000����1����ǂ�ǂ�グ�Ă����ƁA�O�ɂȂ�܂��B
----- �����܂Ł@20180428 -----
�C�Â��܂������H
�u�����P�Ƀ}�C�N�Q�̏ꍇ�v�̏͂ƁA�u�����P�̃}�C�N�R�̏ꍇ�v�̏͂Ŏg�p�����v�Z���̌`���Ⴄ���ƂɋC���t���܂������H
�u�����P�Ƀ}�C�N�Q�̏ꍇ�v�̏͂Ŏg�����v�Z����
�u�����P�̃}�C�N�R�̏ꍇ�v�̏͂Ŏg�����v�Z����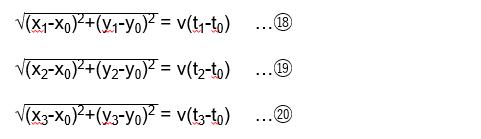
�ł��B
�ꌩ�A���������g��������t0���܂܂Ȃ���̎��̕����ǂ��悤�Ɏv���܂��B
�����ŁA������̕��Ōv�Z���Ă݂܂��傤�B
������̎�����́A
+4*((x2-x1)^2-(t2-t1)^2*v^2)*x0^2
+4*(-(x2-x1)*((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))+(t2-t1)^2*(x2+x1)*v^2)*x0
+8*(x2-x1)*(y2-y1)*x0*y0
+4*((y2-y1)^2-(t2-t1)^2*v^2)*y0^2
+4*(-(y2-y1)*((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))+(t2-t1)^2*(y2+y1)*v^2)*y0
+((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))^2-2*(t2-t1)^2*v^2*(y2^2+y1^2+x2^2+x1^2)+(t2-t1)^4*v^4
=0
��������܂����B
����́A�}�C�N�l�P�`�l�Q���œ_�Ƃ���o�Ȑ���\���Ă��܂����A
���l�ɂl�Q�`�l�R�A�l�R�`�l�P�ł��o�Ȑ����`���܂��B
�܂Ƃ߂�ƁA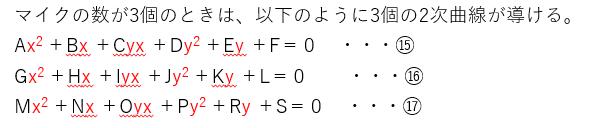
������A�`S�̌W���͈ȉ��̒ʂ�A
A��+4*((x2-x1)^2-(t2-t1)^2*v^2)
B��+4*(-(x2-x1)*((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))+(t2-t1)^2*(x2+x1)*v^2)
C��+8*(x2-x1)*(y2-y1)
D��+4*((y2-y1)^2-(t2-t1)^2*v^2)
E��+4*(-(y2-y1)*((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))+(t2-t1)^2*(y2+y1)*v^2)
F��+((y2-y1)*(y2+y1)+(x2-x1)*(x2+x1))^2-2*(t2-t1)^2*v^2*(y2^2+y1^2+x2^2+x1^2)+(t2-t1)^4*v^4
G��+4*((x3-x1)^2-(t3-t1)^2*v^2)
H��+4*(-(x3-x1)*((y3-y1)*(y3+y1)+(x3-x1)*(x3+x1))+(t3-t1)^2*(x3+x1)*v^2)
I��+8*(x3-x1)*(y3-y1)
J��+4*((y3-y1)^2-(t3-t1)^2*v^2)
K��+4*(-(y3-y1)*((y3-y1)*(y3+y1)+(x3-x1)*(x3+x1))+(t3-t1)^2*(y3+y1)*v^2)
L��+((y3-y1)*(y3+y1)+(x3-x1)*(x3+x1))^2-2*(t3-t1)^2*v^2*(y3^2+y1^2+x3^2+x1^2)+(t3-t1)^4*v^4
M��+4*((x3-x2)^2-(t3-t2)^2*v^2)
N��+4*(-(x3-x2)*((y3-y2)*(y3+y2)+(x3-x2)*(x3+x2))+(t3-t2)^2*(x3+x2)*v^2)
O��+8*(x3-x2)*(y3-y2)
P��+4*((y3-y2)^2-(t3-t2)^2*v^2)
R�� +4*(-(y3-y2)*((y3-y2)*(y3+y2)+(x3-x2)*(x3+x2))+(t3-t2)^2*(y3+y2)*v^2)
S��+((y3-y2)*(y3+y2)+(x3-x2)*(x3+x2))^2-2*(t3-t2)^2*v^2*(y3^2+y2^2+x3^2+x2^2)+(t3-t2)^4*v^4
A*x^2+B*x+C*y*x+D*y^2+E*y+F=0 �@�E�E�E��19
G*x^2+H*x+I*y*x+J*y^2+K*y+L=0�@ �@�E�E�E��20
M*x^2+N*x+O*y*x+P*y^2+R*y+S=0 �@�E�E�E��21
�@D�AJ�AP����������O�łȂ��Ƃ�
�@ y^2 �̍�����������B
J*(A*x^2+B*x+C*y*x+D*y^2+E*y+F)-D*(G*x^2+H*x+I*y*x+J*y^2+K*y+L)
=
(+A*J-D*G)*x^2+(B*J-D*H)*x+(C*J-D*I)*x*y+(E*J-D*K)*y+(F*J-D*L) ��0 �E�E�E��22
�@���l��
P*(A*x^2+B*x+C*y*x+D*y^2+E*y+F)-D*(M*x^2+N*x+O*y*x+P*y^2+R*y+S)
=
+(A*P-D*M)*x^2+(B*P-D*N)*x+(C*P-D*O)*x*y+(-D*R+E*P)*y+(-D*S+F*P)=0 �E�E�E��23
�@��22�A��23�����ꂼ��y�̎��ɂ����
(+A*J-D*G)*x^2+(B*J-D*H)*x+(C*J-D*I)*x*y+(E*J-D*K)*y+(F*J-D*L)=0
��y=-((A*J-D*G)*x^2+(B*J-D*H)*x-D*L+F*J)/((C*J-D*I)*x-D*K+E*J)�@�E�E�E��24
+(A*P-D*M)*x^2+(B*P-D*N)*x+(C*P-D*O)*x*y+(-D*R+E*P)*y+(-D*S+F*P)=0
��y=-((A*P-D*M)*x^2+(B*P-D*N)*x-D*S+F*P)/((C*P-D*O)*x-D*R+E*P)�@�E�E�E��25
��24�|��25�ɂ����ĕ�������߂�
((C*P-D*O)*x-D*R+E*P)* ((C*J-D*I)*x-D*K+E*J)* (��24-��25)=0
�Ƃ���
((C*P-D*O)*x-D*R+E*P)*(-((A*J-D*G)*x^2+(B*J-D*H)*x-D*L+F*J))
-((C*J-D*I)*x-D*K+E*J)*(-((A*P-D*M)*x^2+(B*P-D*N)*x-D*S+F*P))=0
�����
((C*D*G-A*D*I)*P+(A*D*J-D^2*G)*O+(D^2*I-C*D*J)*M) *x^3
+((A*D*J-D^2*G)*R+(-A*D*K-B*D*I+C*D*H+D*E*G)*P+(B*D*J-D^2*H)*O+(D^2*I-C*D*J)*N+(D^2*K-D*E*J)*M) *x^2
+((D^2*I-C*D*J)*S+(B*D*J-D^2*H)*R+(C*D*L-B*D*K-D*F*I+D*E*H)*P+(D*F*J-D^2*L)*O+(D^2*K-D*E*J)*N) *x
+(D^2*K-D*E*J)*S+(D*F*J-D^2*L)*R+(D*E*L-D*F*K)*P
=0
������
a= ((C*D*G-A*D*I)*P+(A*D*J-D^2*G)*O+(D^2*I-C*D*J)*M)
b= +((A*D*J-D^2*G)*R+(-A*D*K-B*D*I+C*D*H+D*E*G)*P+(B*D*J-D^2*H)*O+(D^2*I-C*D*J)*N+(D^2*K-D*E*J)*M)
c= +((D^2*I-C*D*J)*S+(B*D*J-D^2*H)*R+(C*D*L-B*D*K-D*F*I+D*E*H)*P+(D*F*J-D^2*L)*O+(D^2*K-D*E*J)*N)
d= +(D^2*K-D*E*J)*S+(D*F*J-D^2*L)*R+(D*E*L-D*F*K)*P
�ƒu���Ɨ^���́A
�@a*x^3 �{b*x^2 �{c*x �{d���O
�Ə�����B
�����̑I�ѕ��ŁA�u�Q���������̉������߂�v���ɂȂ�̂��A�u�R���������̉������߂���Ȃ��v���ɂȂ�̂��A�Ƃ������ƂɂȂ�܂��B
�Q���������̈�ʉ��̌����͍��Z�ŏK���܂����B
�@a*x^2 �{b*x �{c ���O
�̈�ʉ��̌�����
x = �i-��+SQRT�ib^2-4*a*c))/(2*a)
�@or
x = �i-���|SQRT�ib^2-4*a*c))/(2*a)
�Ȃ̂ŁA�R���������̈�ʉ��������������ƂȂ����낤�Ƒz�����܂����E�E�E
���Ȃ݂ɁA
�@a*x^3 �{b*x^2 �{c*x �{d���O
�̈�ʉ��́A

�@x���|�yc*((�|32^(4/3))*a*��^(2/3)�|(92^(2/3))*a*b*��^(1/3)�|18*a*b^2)+(2^(4/3))*(b^2)*(��^(2/3)+d*((272^(2/3))*(a^2)*��^(1/3)+54*(a^2)*b)�|(2^(2/3))*(3^(3/2))*a*��*��^(1/3)+(2^(5/3))*(b^3)*(��^(1/3))�|(23^(3/2))*a*b*��+4*b^4�z/�y�|(23^(5/2))*(a^2)*��+163*(a^3)*d�|54*(a^2)*b*c+12*a*b^3�z�@�E�E�E��26
�@x���|�yc*(a*((32^(4/3))*��^(2/3)�|(2^(4/3))*(3^(3/2))*%i*��^(2/3))+a*b*(+(2^(2/3))*(3^(5/2))*%i*��^(1/3)+(92^(2/3))*��^(1/3))�|36*a*b^2)+(b^2)*�i+(2^(4/3))*(3^(1/2))*��^(2/3)�|(2^(4/3))*��^(2/3))+d*((a^2)*(�|(2^(2/3))*(3^(7/2))*%i*��^(1/3)�|(272^(2/3)*��^(1/3))+108*(a^2)*b)+a*(+(92^(2/3)*%i*��*��^(1/3)+(2^(2/3))*(3^(3/2))*��*��^(1/3))+(b^3)*(�|(2^(5/3))*(3^(1/2))* %i*��^(1/3)�|(2^(5/3))*��^(1/3))�|(43^(3/2))*a*b*��+8*b^4�z/�y�|(43^(5/2))*(a^2)*��+324*(a^3)*d�|108*(a^2)*b*c+24*a*b^3�z�@�E�E�E��27
�@x���|�yc*(a*((32^(4/3))*��^(2/3)+(2^(4/3))*(3^(3/2))*%i*��^(2/3))+a*b*(�|(2^(2/3))*(3^(5/2))*%i*��^(1/3)+(92^(2/3))*��^(1/3)) �|36*a*b^2)+(b^2)*�i�|(2^(4/3))*(3^(1/2))*��^(2/3)�|(2^(4/3))*��^(2/3))+d*((a^2)*(+(2^(2/3))*(3^(7/2))*%i*��^(1/3)�|(272^(2/3))*��^(1/3))+108*(a^2)*b)+a*(�|(92^(2/3))*%i*��*��^(1/3)+(2^(2/3))*(3^(3/2))*��*��^(1/3))+(b^3)*(+(2^(5/3))*(3^(1/2))*%i*��^(1/3)�|(2^(5/3))*��^(1/3))�|(43^(3/2))*a*b*��+8*b^4�z/�y�|(43^(5/2))*(a^2)*��+324*(a^3)*d�|108*(a^2)*b*c+24*a*b^3�z�@�E�E�E��28
���₷���`����
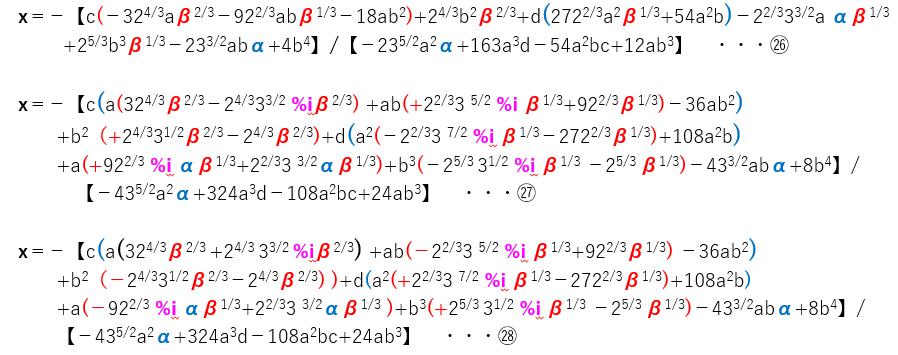
���l�v�Z���������Ƃ͎v��Ȃ��ł��B
���������\�t�g
������W�J��������������������肷�鑀������Ƃōs���Ă���Ƃǂ����Ă��ԈႢ�������₷���̂ł��B
�����ŁA���������\�t�g�����p����ƁA���̑���̔ς킵������������āA���̏�ԈႢ�����Ȃ��Ȃ�܂��B
���������\�t�g�ő����Ɏ����D�݂ɉ��H����ۂɊԈႢ��������Ƃ����A��Ȃ��͂Ȃ��Ȃ̂ł����E�E�B
�����̐��������\�t�g���C���^�[�l�b�g�������ł��܂��B
�g�����̓��发�Ƃ��ẮA�u���[�o�b�N�X�i�|���O���j������܂��B
���̐������Ă݂����Ǝv������A�u�͂��߂Ă�Maxima�i���c���j���j�v������܂��B
����������B
������ʂ̎��̓W�J�y�ш���������Maxima���������Ɋ��p���܂����B
�܂�3���������̈�ʉ���Maxima���g���ċ��߂܂����B
Maxima�ł�4���������̈�ʉ��͋��߂��܂���B�i�������Ȃ��H�j
��x�AMathematica�i�L���̐��������\�t�g�j���g����@��������Ƃ��ɁA4���������̈�ʉ������߂Ă݂܂����B
�`�S�̎��ɐ��y�[�W�ɂ킽���Ĉ�����Ȃ���Ώ�������Ȃ����炢�������̐������o�Ă��Ă��܂����A
�u���̍����͂ǂ��܂Ŕ���Ă���̂��H�v�Ƃ������炢�������A�܂������̒��ɂ���ɍ���������A�ǂ݉����̂���ςł��B
5���ȏ�̕������̈�ʉ��͑��݂��Ȃ������ł��B
���m�ɂ�
�u�㐔�w�̊�{�藝�ɂ��A�C�ӂ̕��f���W���������͕��f���̒��ɍ������݂��邪�A�������Ȃ���5���ȏ�̕������ɂ͈�ʂɂ͑㐔�I��@�͕K���������݂��Ȃ��B
���Ȃ킿�A��ʂ̌��������ɑ��đ㐔�I�ȍ��̌����͑��݂��Ȃ��B
���������ڂ��������ƁA5���̈�ʕ������̍����A���̎��̊e���̌W���ƗL�����́A�L����̎l�����Z�y�їL����̍������Ƃ鑀��̑g�ݍ��킹�ŕ\�����邱�Ƃ͂ł��Ȃ��B�v
�iWikipedia�j
�����炠����́u�K���A���_�v�̗̈�ł��ˁB
----- �����܂Ł@20180429 -----
HOME�ɖ߂�